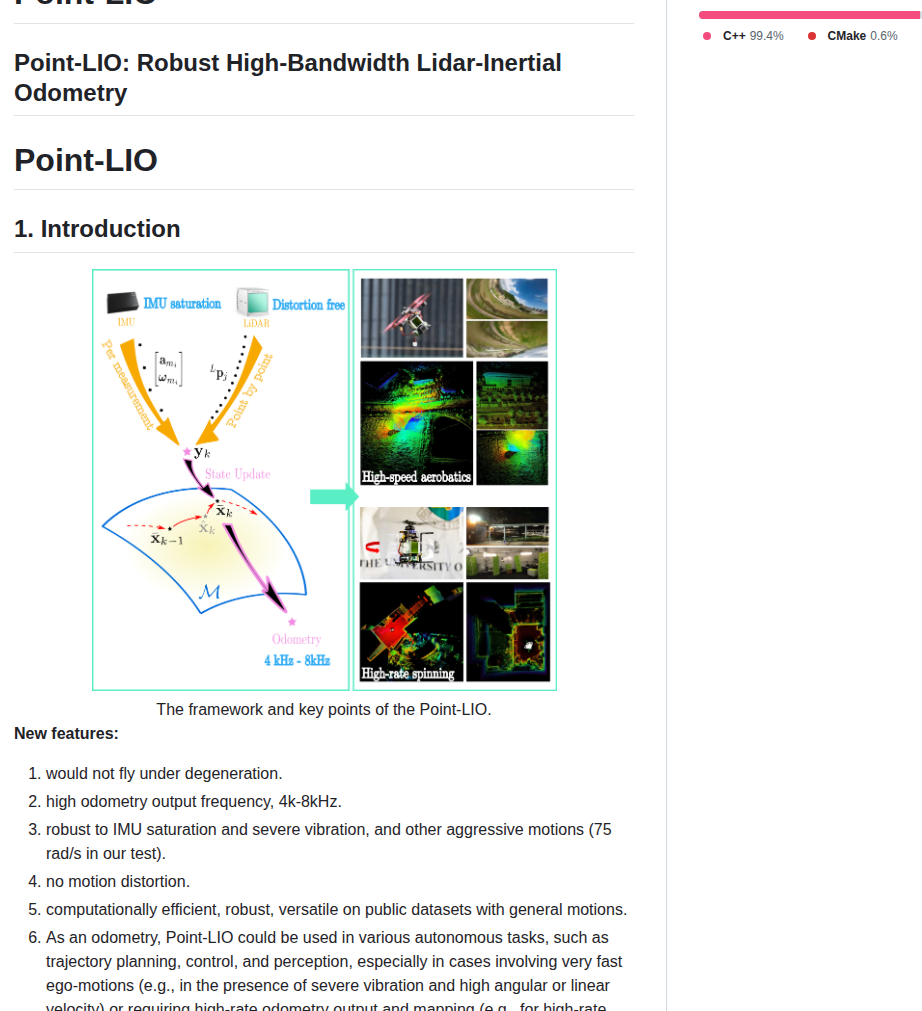
hku-mars/Point-LIO
High-bandwidth LiDAR-inertial odometry at 4-8kHz
View on index · View in 3D Map
Related repos
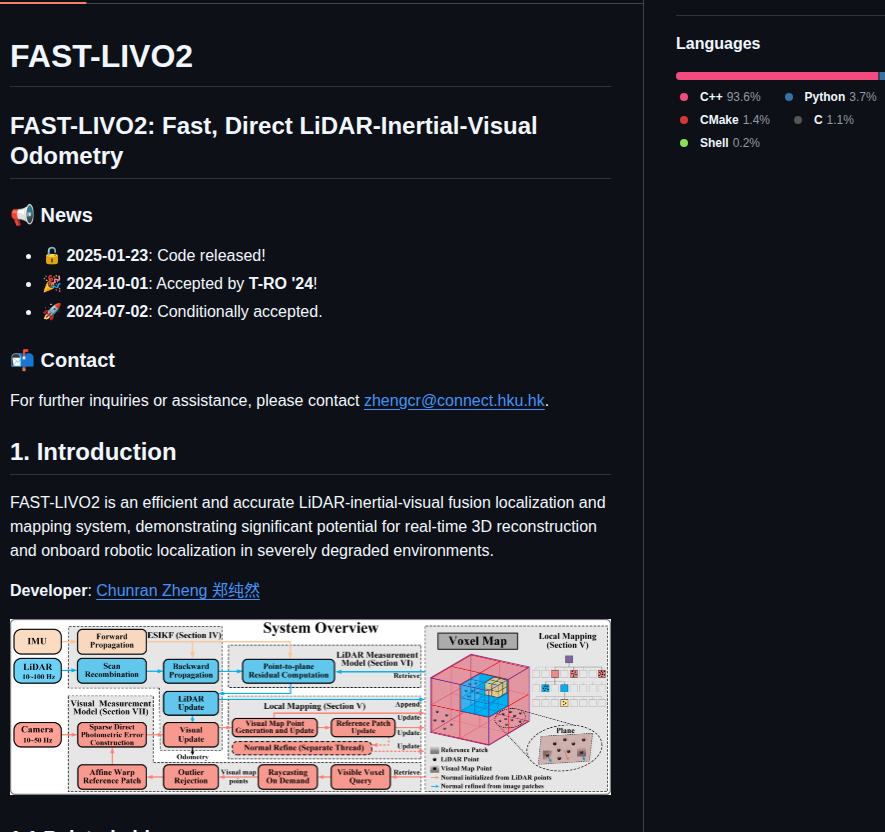
- Direct LiDAR-inertial-visual odometry for real-time 3D reconstruction
- Real-time lidar-inertial odometry
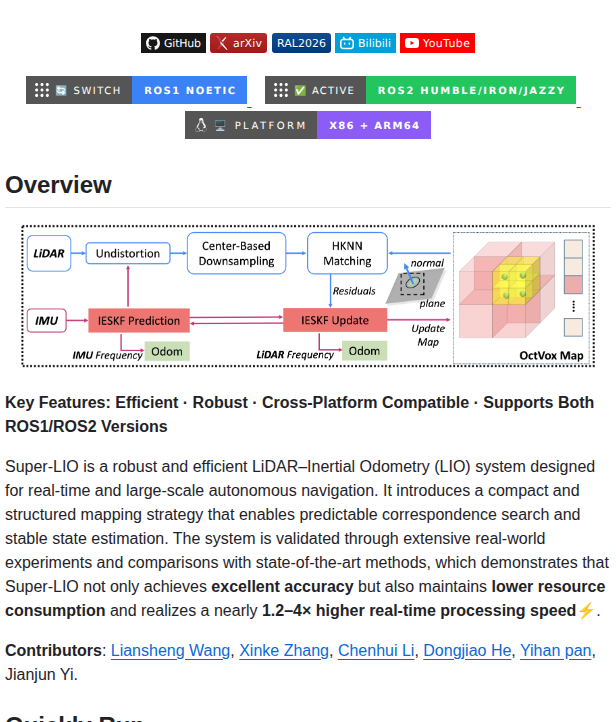
- Real-time LiDAR-inertial odometry with compact OctVox mapping
- LiDAR SLAM system with 400 FPS performance
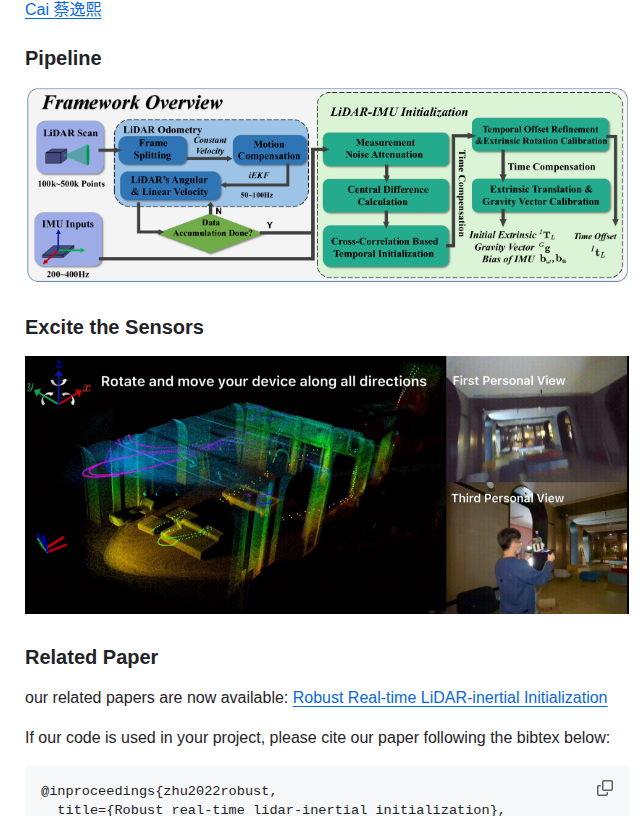
- Robust LiDAR-IMU initialization without manual targets
- Robust LiDAR odometry using adaptive weighting

- LiDAR odometry through data matching
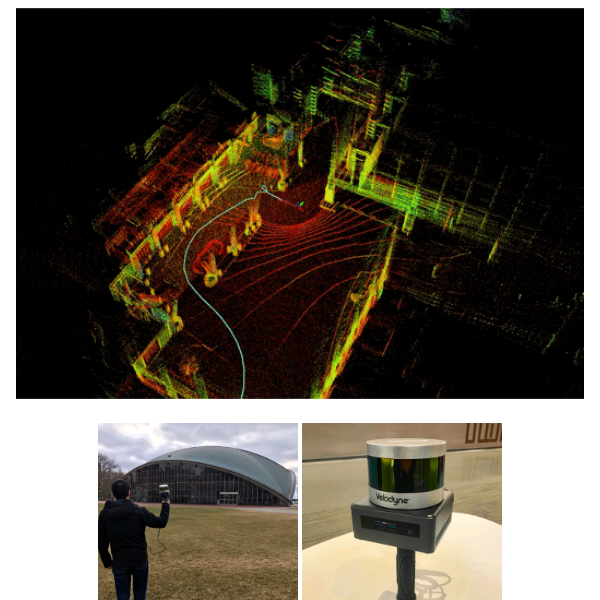
- Generates dense 3D maps in real-time
- Encoder for 3D point cloud tasks
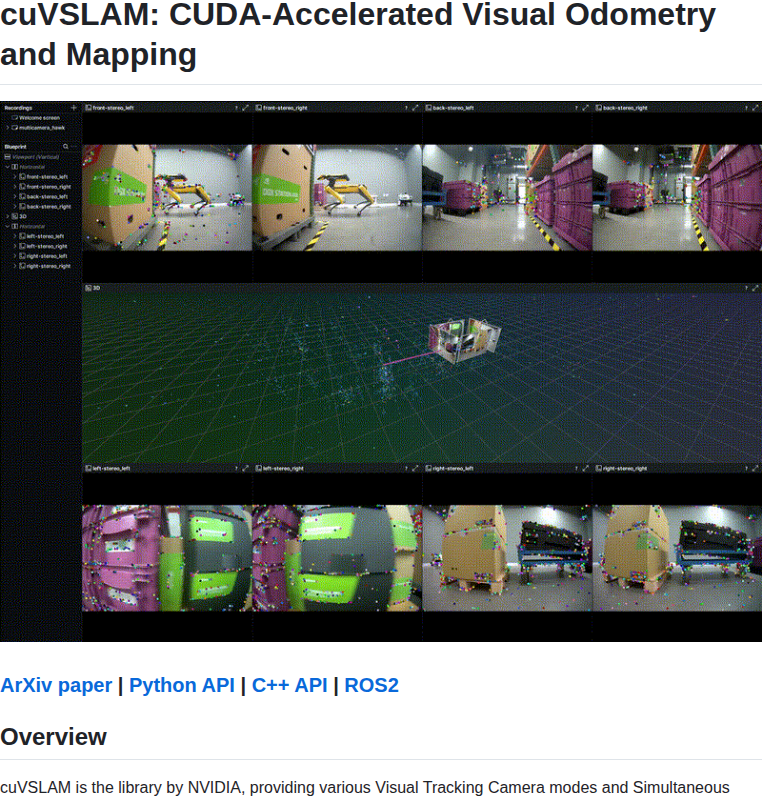
- CUDA-accelerated visual SLAM for robotics