xiaomi-research/onevl
Fast, interpretable trajectory prediction for autonomous driving

View on index · View in 3D Map
Related repos
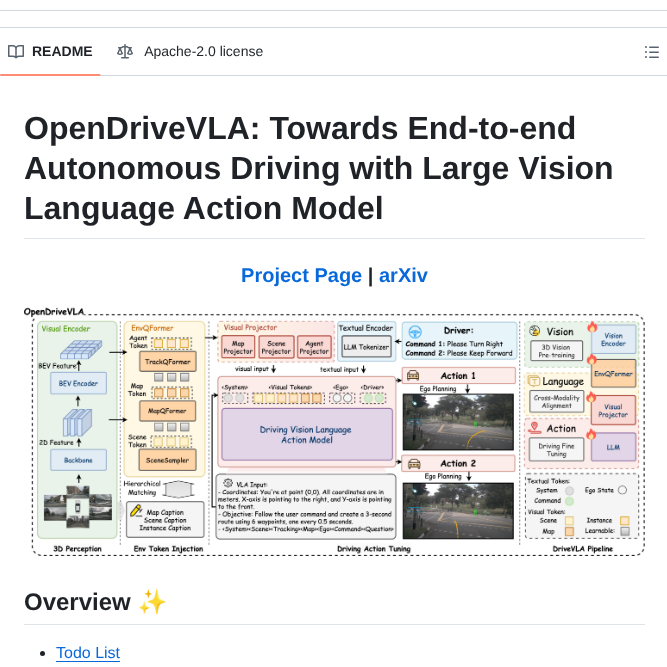
- End-to-end autonomous driving with vision-language-action models
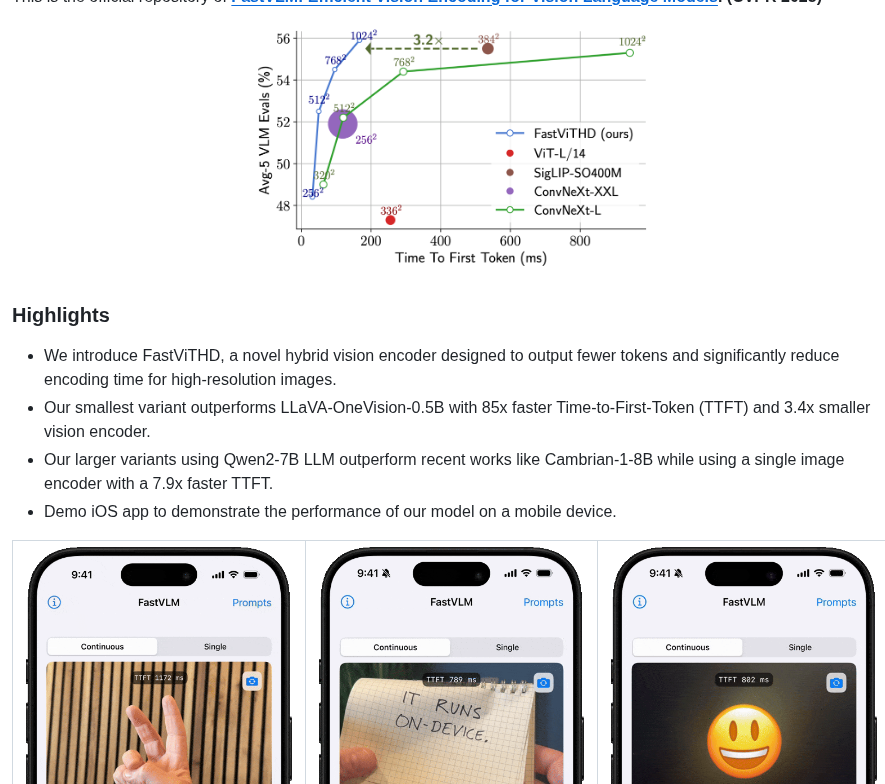
- fast vision-language model for on-device AI
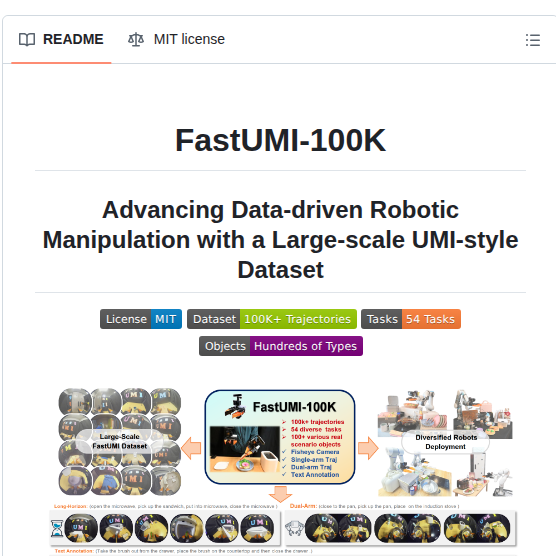
- Dataset of robot trajectories for manipulation tasks
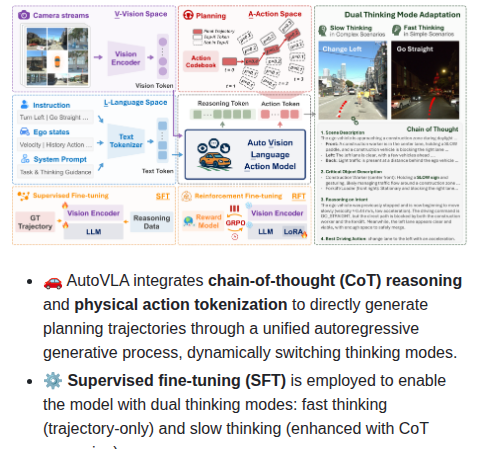
- Vision-Language-Action model with adaptive reasoning for autonomous driving
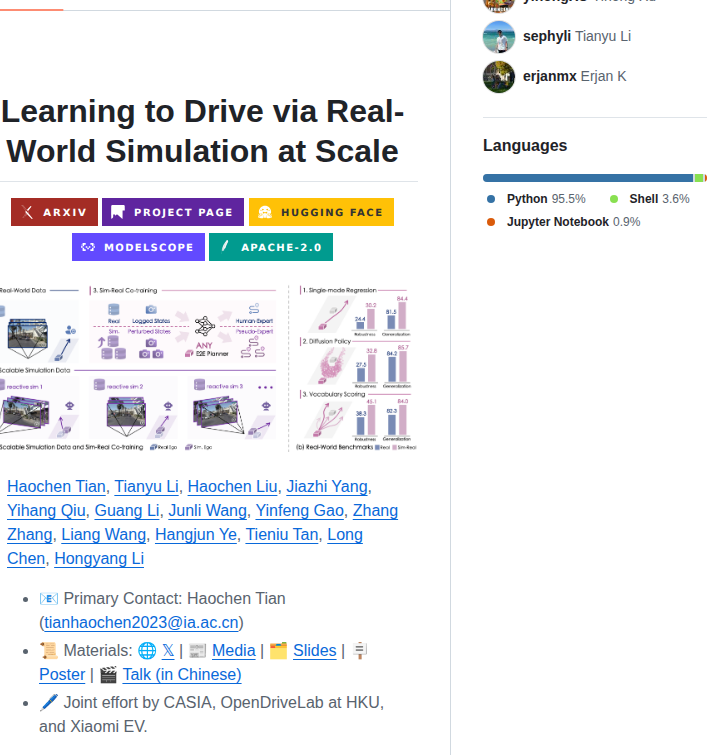
- Large-scale real-world simulation for autonomous driving
- Dataset and model for robot manipulation

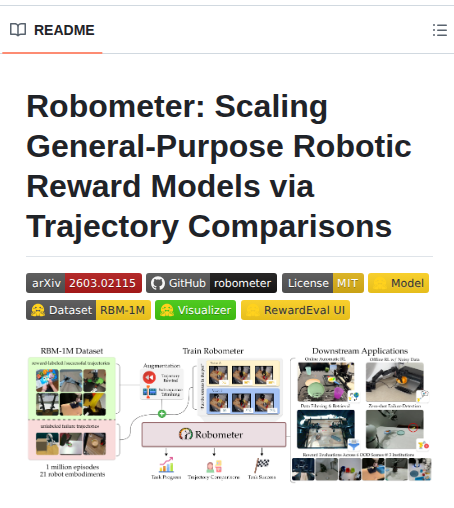
- Trains robotic reward models using trajectory comparisons
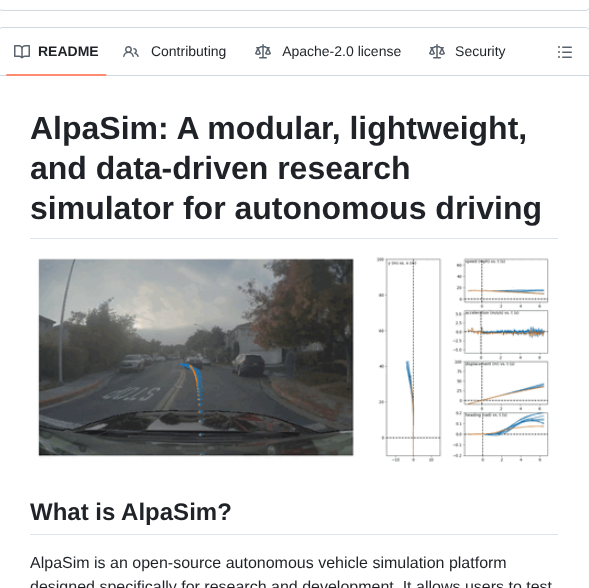
- Modular simulator for autonomous driving research
- Mixture-of-Experts for autonomous driving
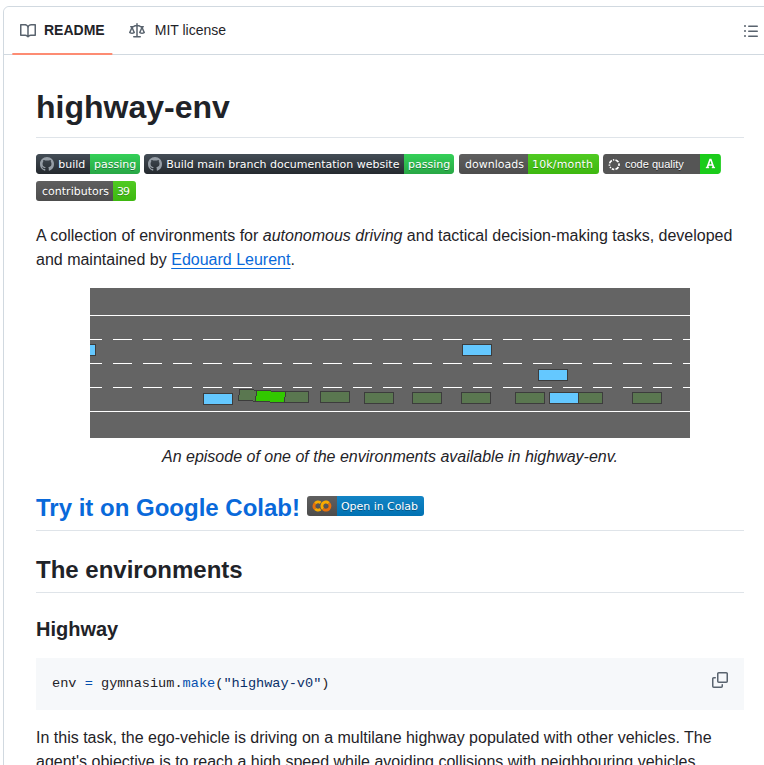
- Environments for autonomous driving and decision-making tasks