team-aprl/MR.ScaleMaster
Fuses multi-robot trajectories into a metrically consistent global map
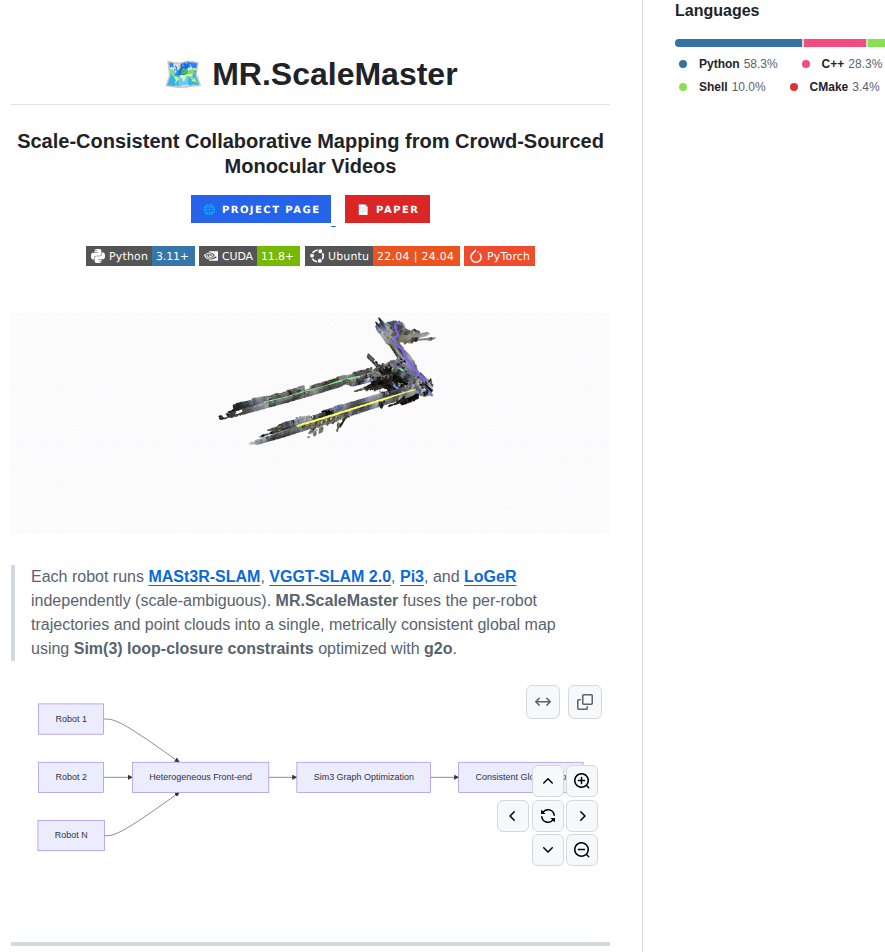
View on index · View in 3D Map
Related repos
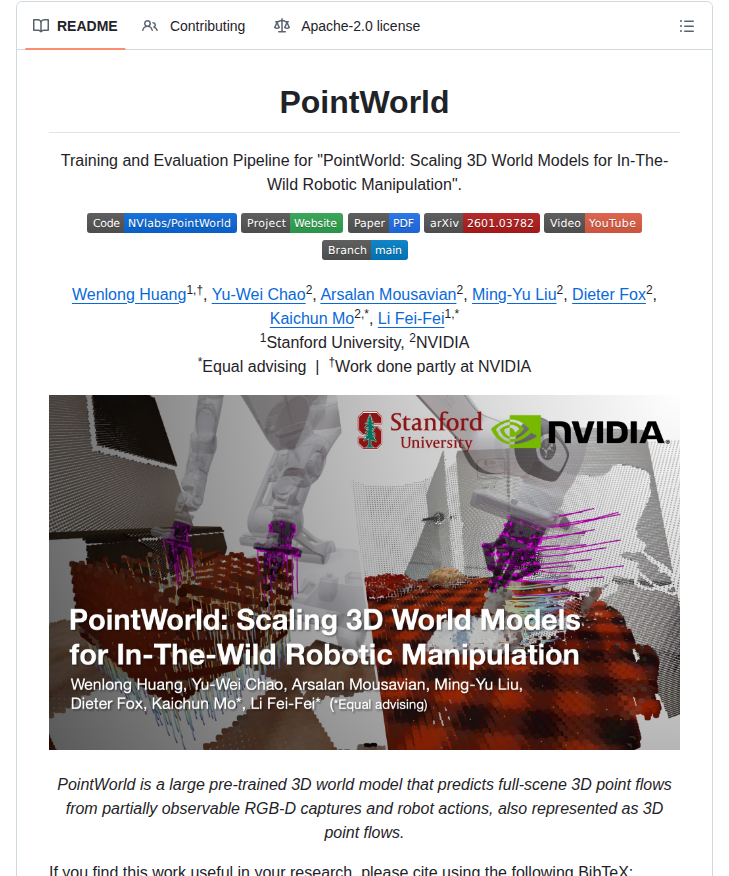
- PointWorld scales 3D world models for robotic manipulation
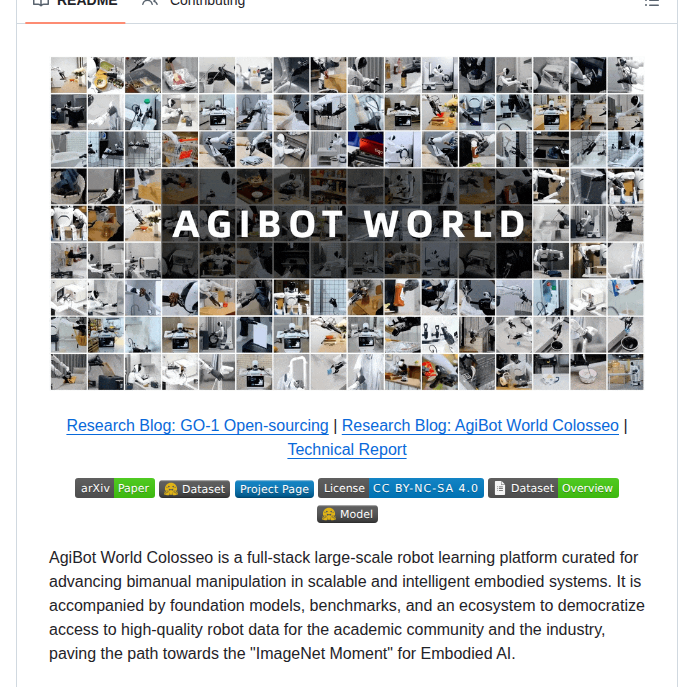
- Robot learning platform for bimanual manipulation
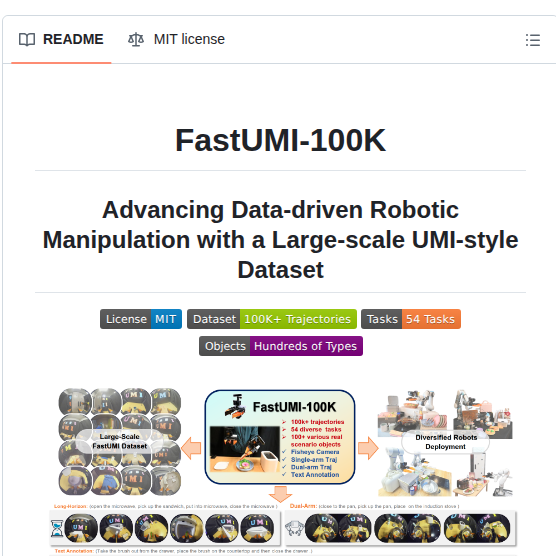
- Dataset of robot trajectories for manipulation tasks
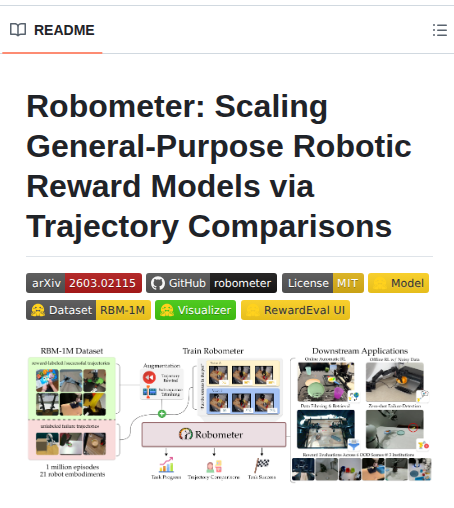
- Trains robotic reward models using trajectory comparisons
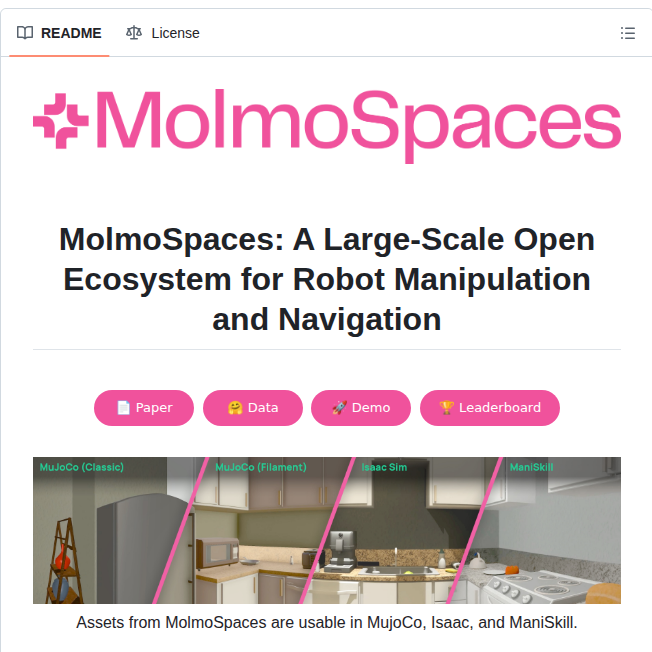
- Ecosystem for robot manipulation and navigation
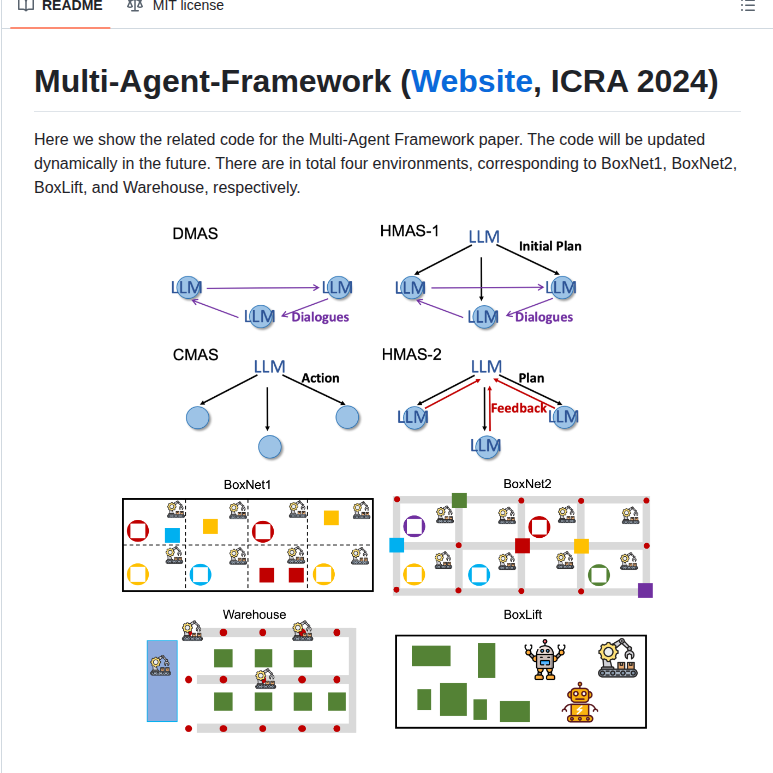
- LLM discussion framework for multi-agent robot coordination
- Platform for robot learning across simulators and embodiments
- open-source models for training and fine-tuning generalist robot control with vision, language, and action
- Dataset and model for robot manipulation

- Multi-agent system for scaling GenAI tasks