rmurai0610/MASt3R-SLAM
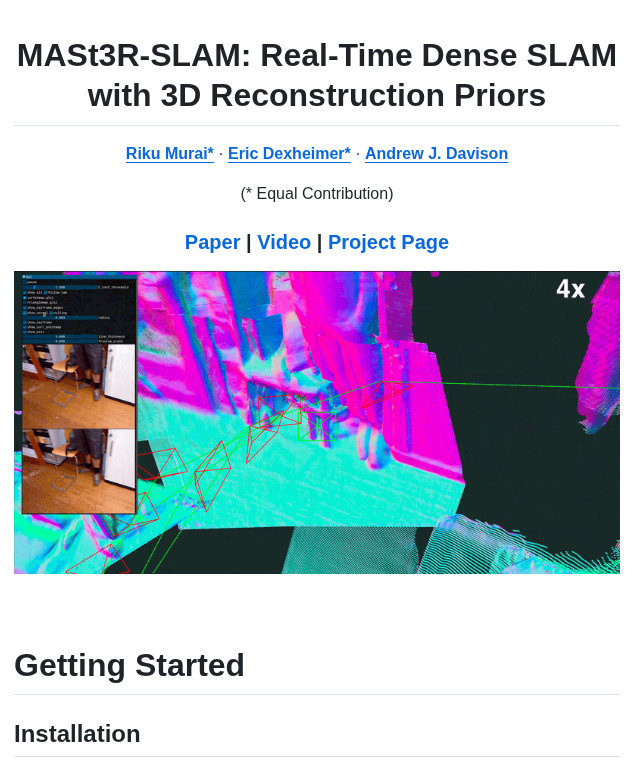
Real-time dense SLAM from a single camera using 3D reconstruction priors, with global pose and geometry estimation at 15 FPS
View on index · View in 3D Map
Related repos
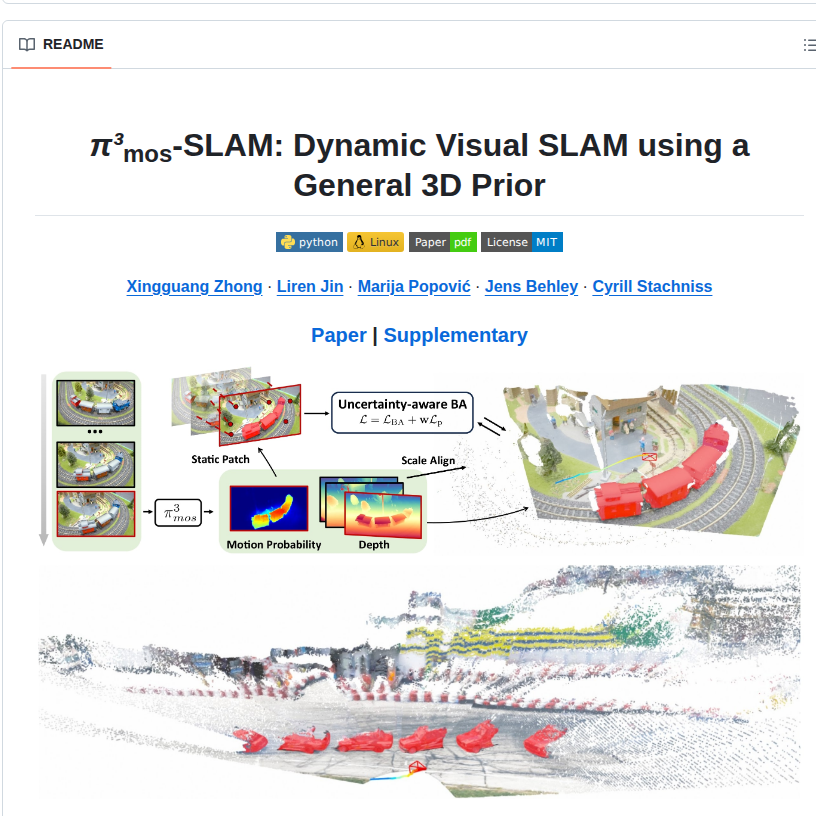
- Visual SLAM using a 3D prior for dynamic environments
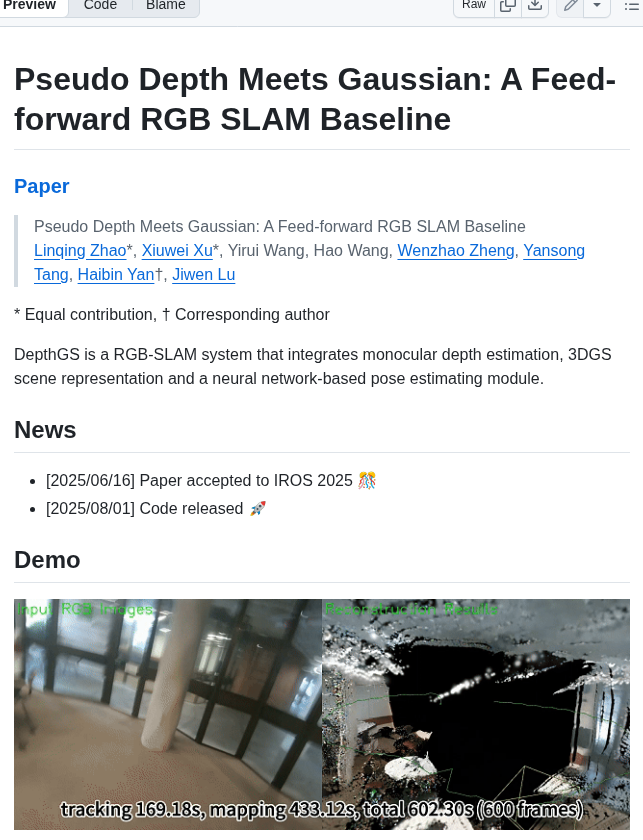
- RGB SLAM baseline using monocular depth and Gaussian scene mapping, easy to try out for 3D reconstruction from video
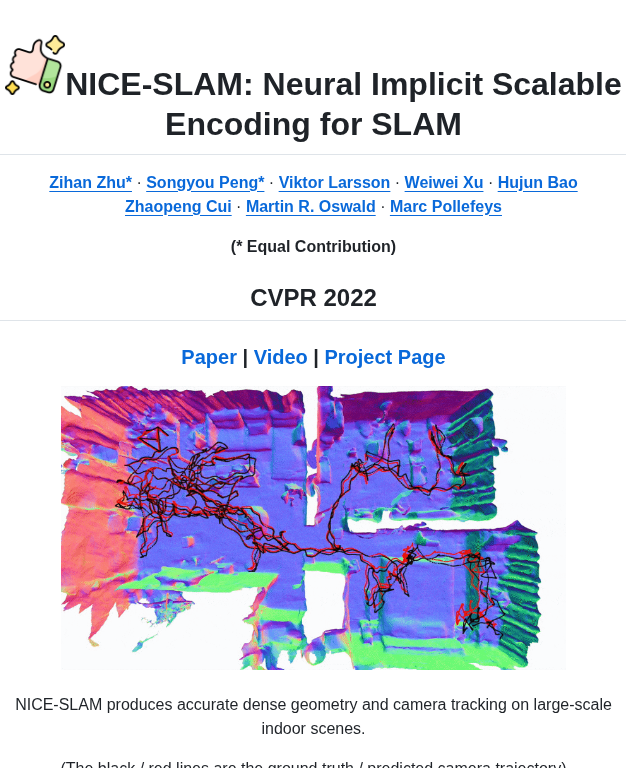
- dense SLAM with neural implicit encoding for indoor scenes
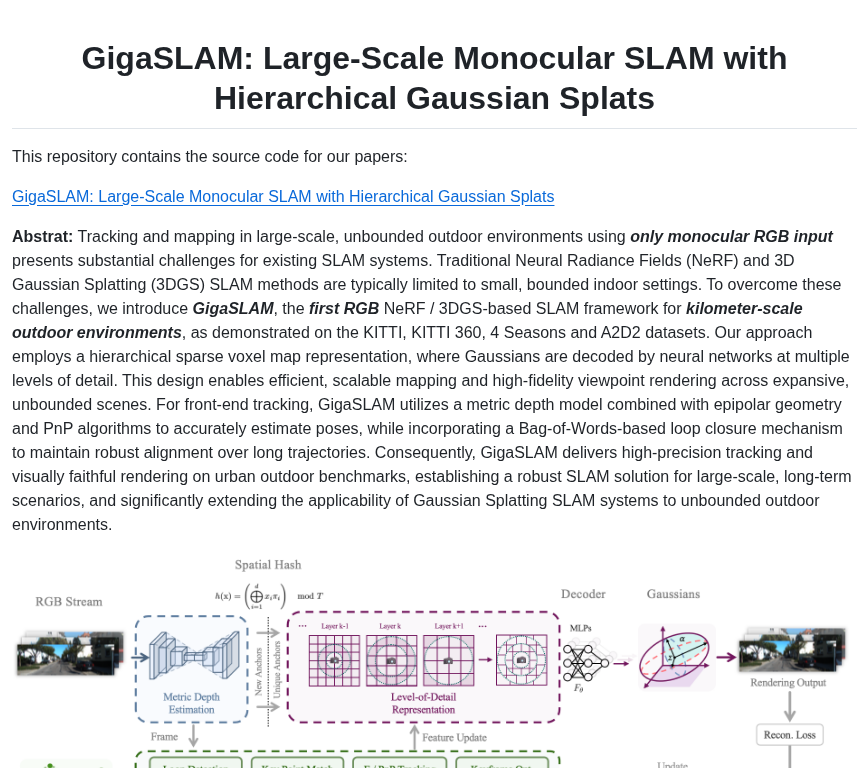
- monocular SLAM for huge outdoor scenes using hierarchical Gaussian splats
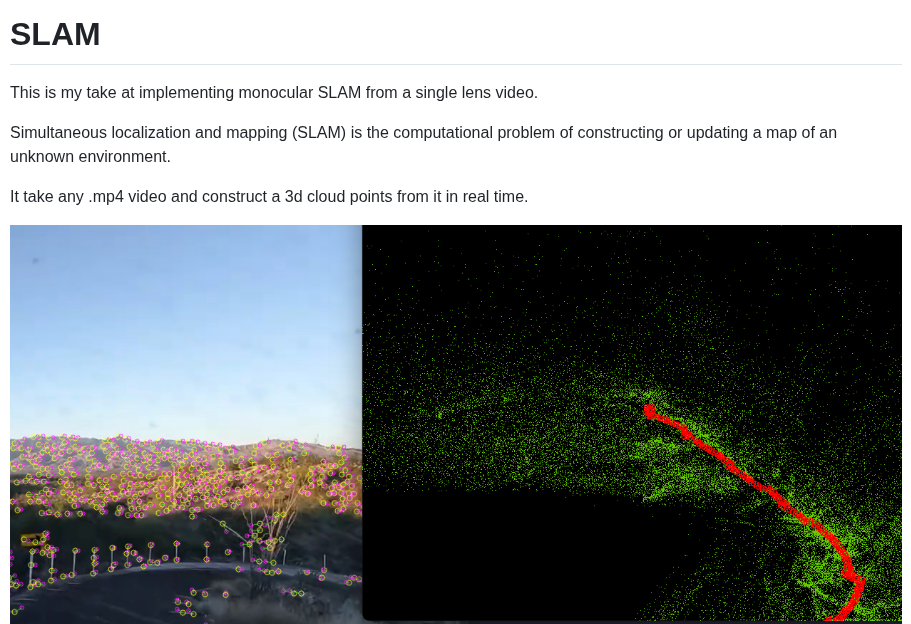
- turn any mp4 video into a 3d point cloud in real time
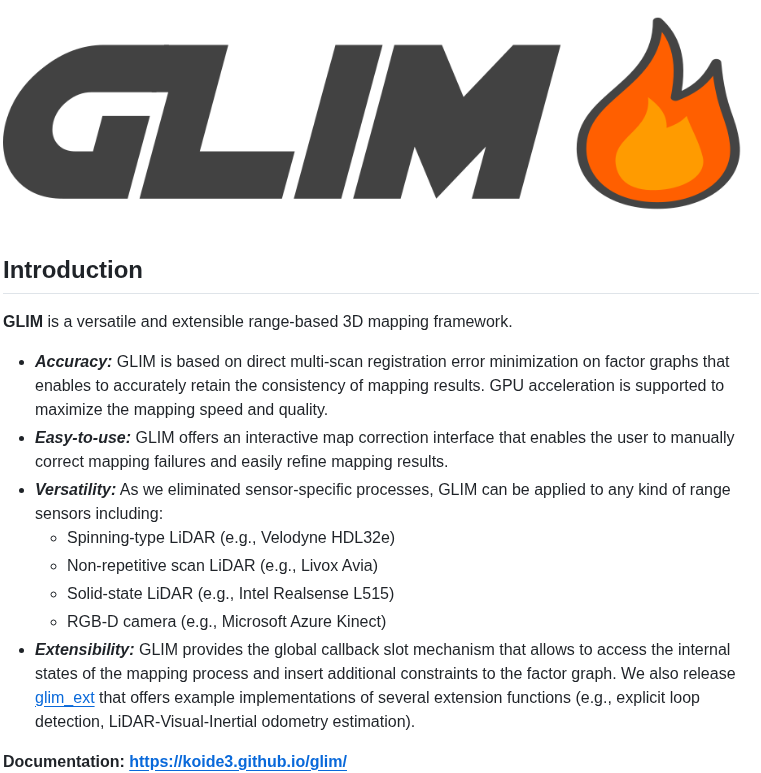
- 3D mapping with multi-sensor support and manual correction
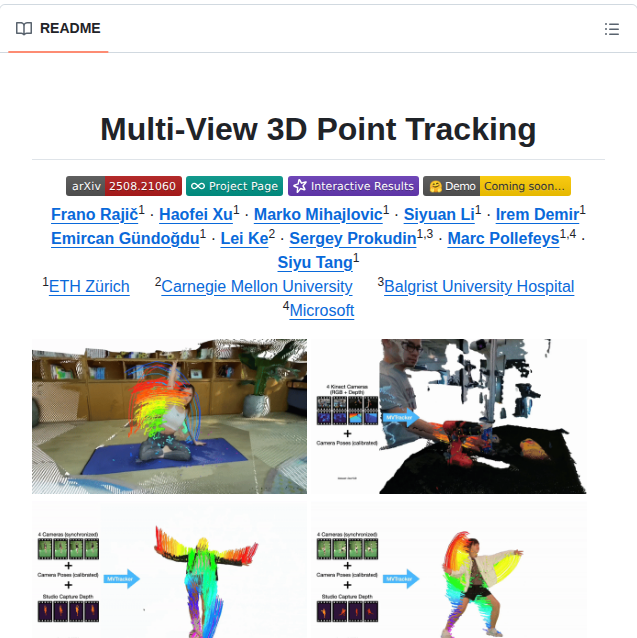
- Tracks 3D points across multiple camera views
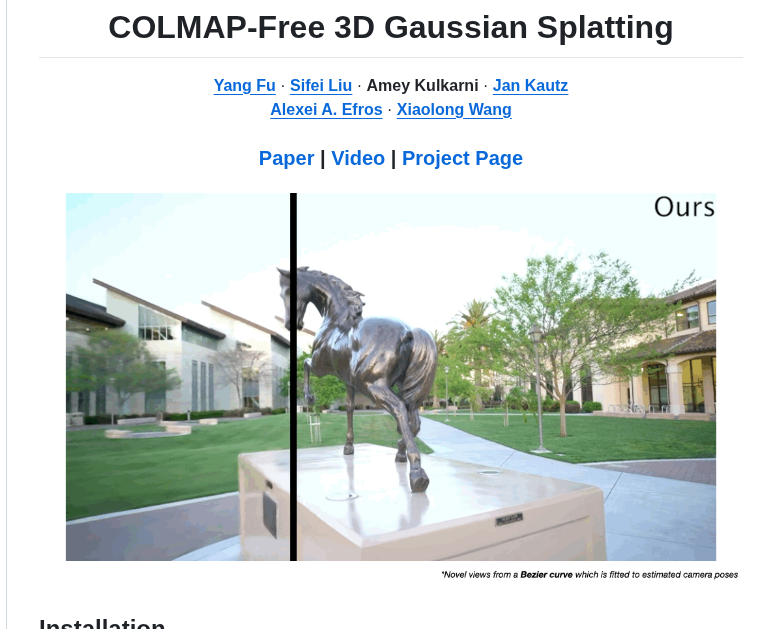
- 3D Gaussian splatting without COLMAP for fast scene reconstruction
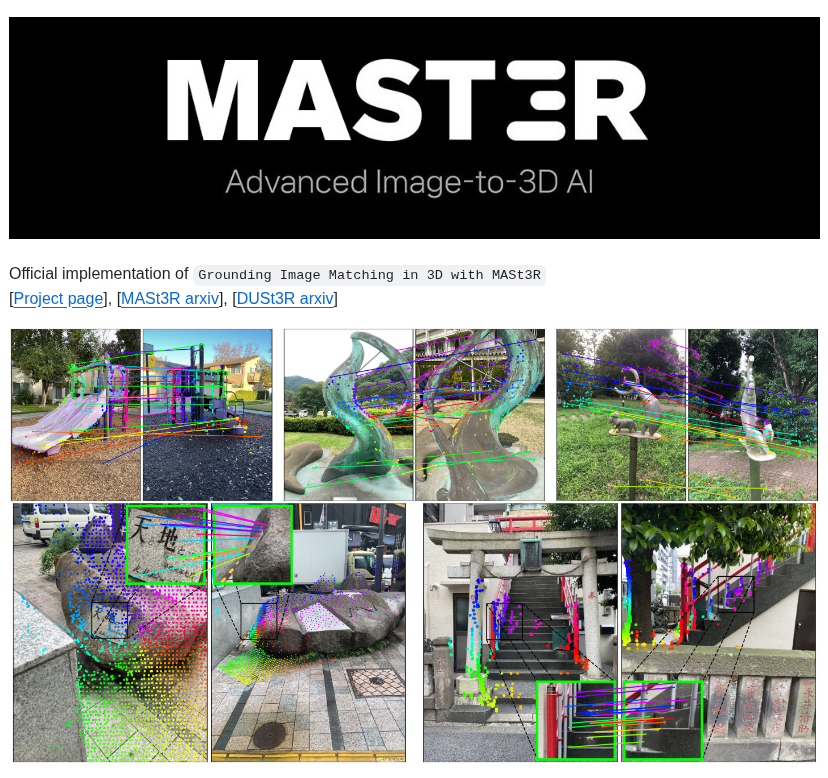
- image-to-3D matching with MASt3R
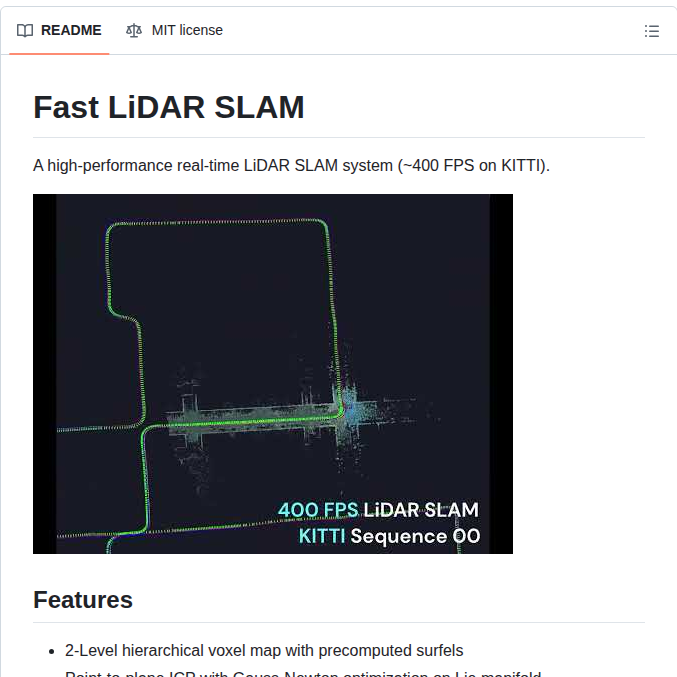
- LiDAR SLAM at 400 FPS on KITTI