rail-berkeley/hil-serl
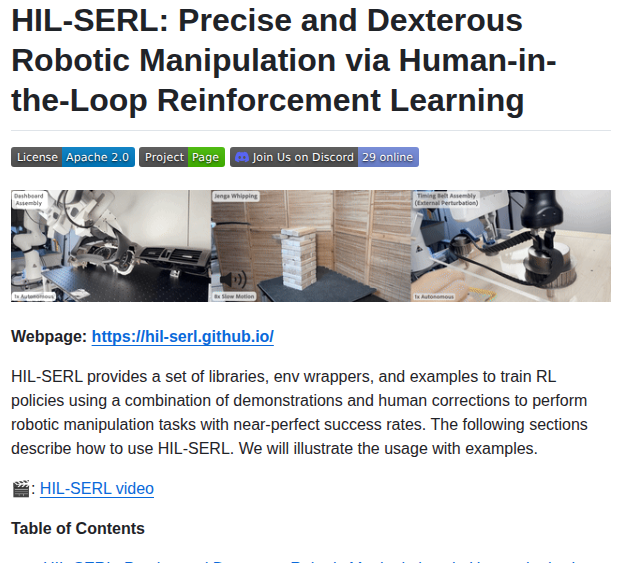
Human-in-the-loop reinforcement learning for precise robotic manipulation
View on index · View in 3D Map
Related repos
- open-source models for training and fine-tuning generalist robot control with vision, language, and action
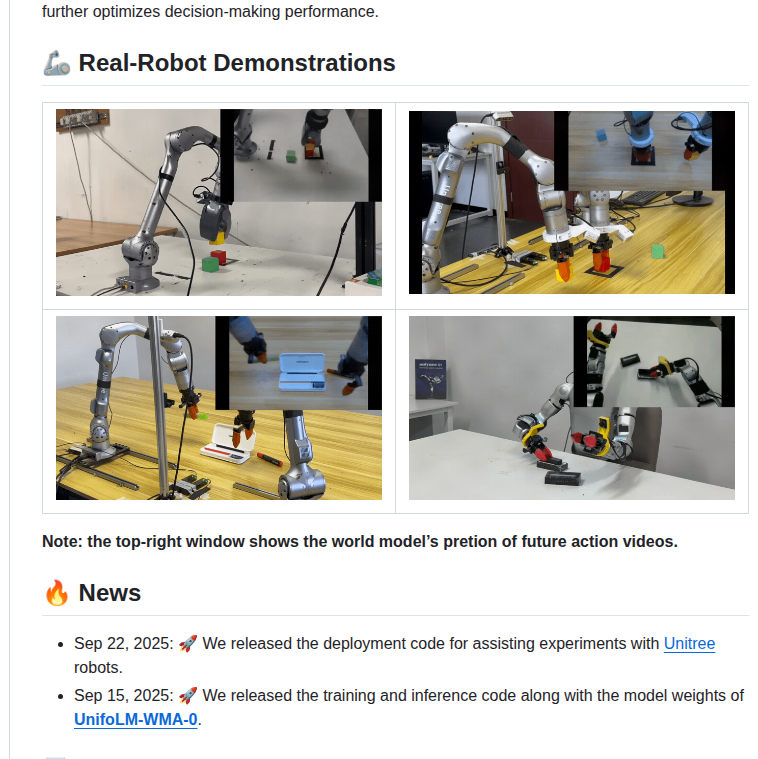
- World-model-action architecture for robot learning
- Trains SO-ARM100 robots using Isaac Lab reinforcement learning
- Imitation learning baselines for robotic manipulation
- Hardware kit for robot learning
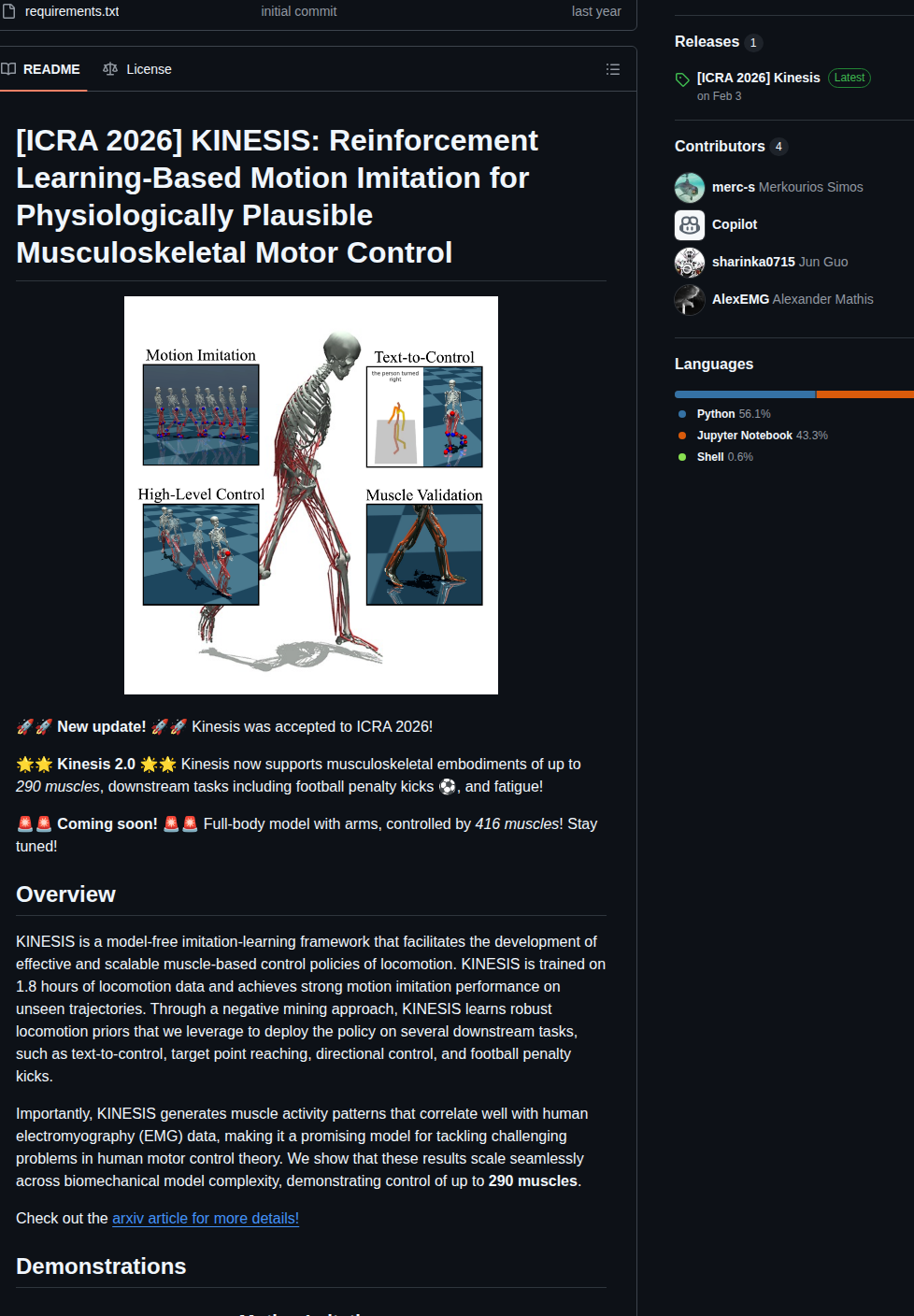
- Reinforcement learning for motion imitation in 290-muscle skeletons
- Psi0: Humanoid loco-manipulation model trained on 80 trajectories
- Dataset of robot trajectories for manipulation tasks
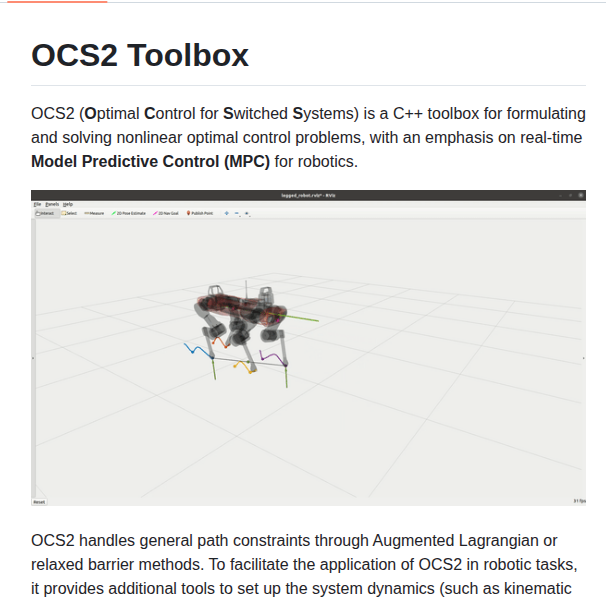
- Toolbox for control of robots using model predictive control
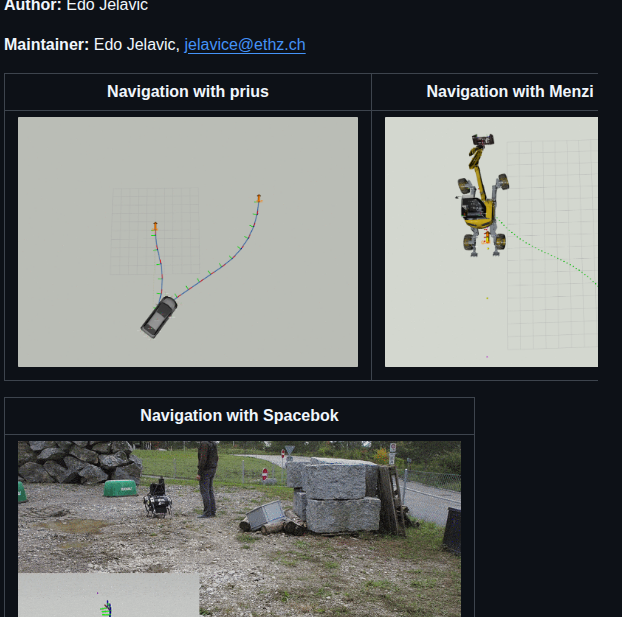
- Path planning and control for car-like autonomous robots